Track Robot Web Control System
 |
|
 |
In Yoyogi Park, the Track Robot was operated during the show by a user at the ICC.
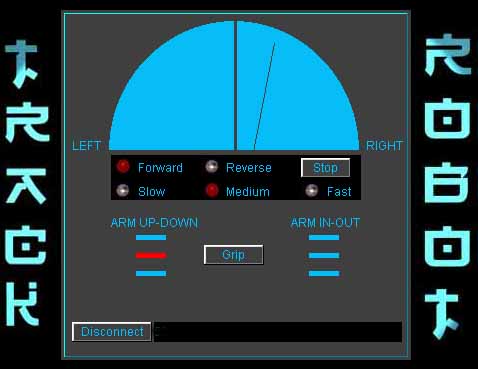
A Java applet was used to send commands to drive and manipulate
the robot arm. Video conferencing via NetMeeting
was used as a feedback mechanism to facilitate steering by providing live audio and video
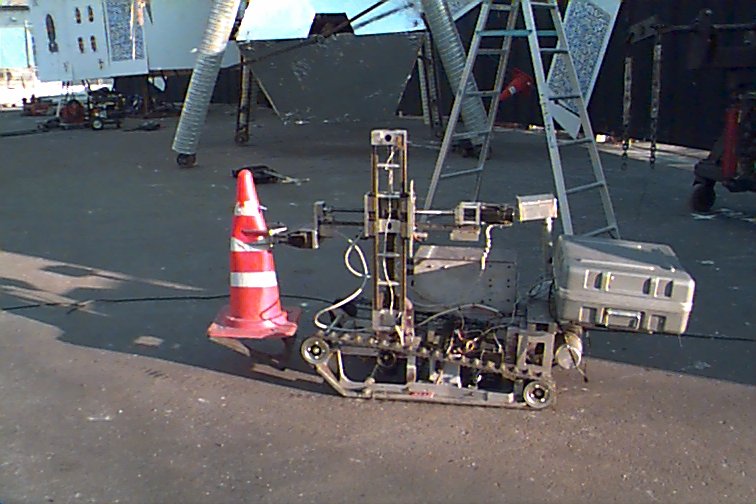
coming from a Winnov camera mounted on the Track Robot back to the user. An IBM Thinkpad
was strapped on as well to send commands to the controllers
via HTTP, TCP/IP, and the serial port
to drive the machine.
A Wavelan wireless network was used to provide connectivity between
the tetherless Track Robot to the ICC's fast internet connection.
The Track Robot was tele-operated at the show for about 15 minutes. This is the first time that SRL has enabled a machine to be operated remotely by a non-crew member in a live show. |